
Was früher ein Seekartenplotter war, ist heute meist eine multifunktionale Navigationszentrale, in der alle erdenklichen Geberdaten zusammenlaufen, was wiederum neue Möglichkeiten bei der Auswertung erschließt. Vor der Anschaffung und Zusammenstellung eines solchen Systems lohnt es sich, einen näheren Blick auf die zur Auswahl stehenden Netzwerk- und Schnittstellenstandards zu werfen.
Maritime Netzwerkstandards
Glich die Navigation einer umfangreich ausgestatteten Fahrtenyacht mit all ihren Einzelgeräten früher dem Messestand eines Marineelektronik-Vollsortimenters, laufen die Daten der an Bord installierten Komponenten heute meist auf einem Bildschirm zusammen. Das betreffende Display befindet sich auch nicht mehr obligatorisch in der Navigation unter Deck, sondern kann stattdessen ebenso im Cockpit platziert werden. Zumal moderne Fahrtenyachten oft auch gar nicht mehr über einen regulären Navigationsbereich mit großem Kartentisch und viel Platz für Einbauinstrumente unter Deck verfügen.
Die zentrale Display- und Bedieneinheit wird immer noch gern als „Plotter“ bezeichnet. Dabei reichen die Möglichkeiten solcher Geräte weit über die Darstellung elektronischer Seekarten und entsprechende Navigationsfunktionen hinaus. Sie lassen sich ebenso als Radarbildschirm, grafisches Echolot (Fishfinder/Sonar), AIS-Display (AIS = automatisches Schiffsidentifizierungssystem), Instrumentenkonsole und sogar zur Autopilotsteuerung sowie zur Einleitung von Seefunkanrufen per DSC (DSC = digitaler Selektivruf) nutzen. Treffender und unter Fachleuten gebräuchlicher ist daher die Bezeichnung „Multifunktionsdisplay“, kurz: MFD (international: „Multifunction Display“).
Die eigentliche Messtechnik kommt meist nur mehr als sogenannte „Blackbox“ daher – also als reine Gebereinheit ohne eigene Bedienelemente und ohne eigenes Display. Das betrifft sowohl das GNSS (Global Navigation Satellite System) zur Positionsbestimmung, als auch Radarscanner, AIS-Transceiver, Sonar- sowie elektronische Richtungsgeber (Kompass), Wind- und Geschwindigkeitsmesser (Logge) – und je nach Anspruch auch noch einiges mehr. Lediglich bei der Seefunkanlage und beim Autopiloten sind weiterhin auch noch eigene Bedieneinheiten üblich, wobei sie sich parallel gleichsam über ein MFD steuern lassen.

Speziallösungen für den maritimen Einsatz
Voraussetzung für die Zusammenführung verschiedenster Geberdaten ist eine ausgeklügelte Vernetzung. Bei Marineelektronikkomponenten kommen dafür spezielle Netzwerk- und Schnittstellenstandards zum Einsatz. Hinzu kommen abgestimmte Datenaustauschverfahren. Letztere sollen, vereinfacht erläutert, dafür sorgen, dass sich die einzelnen Komponenten untereinander verstehen, und die Zentrale alle zur Verfügung gestellten Daten auszuwerten vermag. Zugleich tragen diese Lösungen den Besonderheiten auf Wasserfahrzeugen Rechnung (zum Beispiel durch abgedichtete Steckverbindungen).
Mit den Eigenheiten, Vorzüge und Grenzen dieser Standards sollte man sich vor der Planung und Installation eines vernetzten Navigationssystems vertraut machen. Zumal hier von einem reibungslosen „Plug and Play“, wie man es heute vielfach von PC-Komponenten kennt, auch nur sehr eingeschränkt ausgegangen werden kann. Dies gilt insbesondere, wenn unterschiedliche Netzwerkstandards parallel zum Einsatz kommen, was sich nicht immer ganz vermeiden lässt – sowohl aus technischen und mitunter ebenso aus wirtschaftlichen Erwägungen.
Natürlich ließen sich solche Systeme prinzipiell auch ganz individuell konfigurieren – mit rechnergestützten Komponenten und einem Bord-PC als Zentraleinheit. Es gibt spezialisierte Anbieter, die solche Lösungen maßgeschneidert – also ganz auf die individuellen Ansprüche des Nutzers abgestimmt – entwickeln. Wir wollen uns an dieser Stelle jedoch auf marktüblichen Standards konzentrieren, wie sie auf den meisten Yachten zum Einsatz kommen.
Grundlegende Vorteile vernetzter Systeme
Der wesentliche Vorteil vernetzter Navigationssysteme liegt in der bereits erwähnten Bündelung aller Funktionen und Daten in einer zentralen Steuereinheit – besagtem MFD. Das reduziert nicht nur den Platzbedarf, da weitere Displays entfallen können, sondern ermöglicht obendrein eine parallele Auswertung verschiedenster Geberdaten. Beispiele für solche Anwendungen sind ein Radarbild-Overlay auf der elektronischen Seekarte oder die Einblendung von AIS-Zielen auf dem Radarbild – gegebenenfalls auch die Darstellung von allen dreien in einem Bild. Ist obendrein die Seefunkanlage mit angebunden, ist es auch möglich, durch einen Klick auf ein AIS-Zielsymbol sogleich ein DSC-Anruf an das betreffende Fahrzeug einzuleiten.
Die Zusammenführung wichtiger Navigationsparameter wie GNSS-Position, Heading (anliegender Kompasskurs), Fahrt durchs Wasser (Logge), Windrichtung und -geschwindigkeit sowie Kurs und Fahrt über Grund erlaubt unter anderem Rückschlüsse auf Windabdrift und Stromversatz. Ausgeklügelte grafische Darstellungen all dieser Parameter erschließen auf einen Blick, ob die Yacht auf dem aktuellen Kurs zum Wind optimal läuft. Das ist nicht nur für Regattasegler relevant, sondern ermöglicht ebenso Fahrtenseglern eine komfortable Kontrolle des Routings zum angepeilten Ziel.
Zugleich können die Daten bei Bedarf auf mehreren multifunktionalen Displays an unterschiedlichen Standorten abgerufen werden – so zum Beispiel bei Doppelsteuerständen an jeder der beiden Steuersäulen. Die Darstellung lässt sich zudem individuell konfigurieren – wie man es gerade braucht –, was wiederum die Zahl der benötigten Displays reduziert. Wo eben noch die Windanzeige dargestellt wurde, lassen sich alternativ auch Wassertiefe und Fahrt anzeigen.
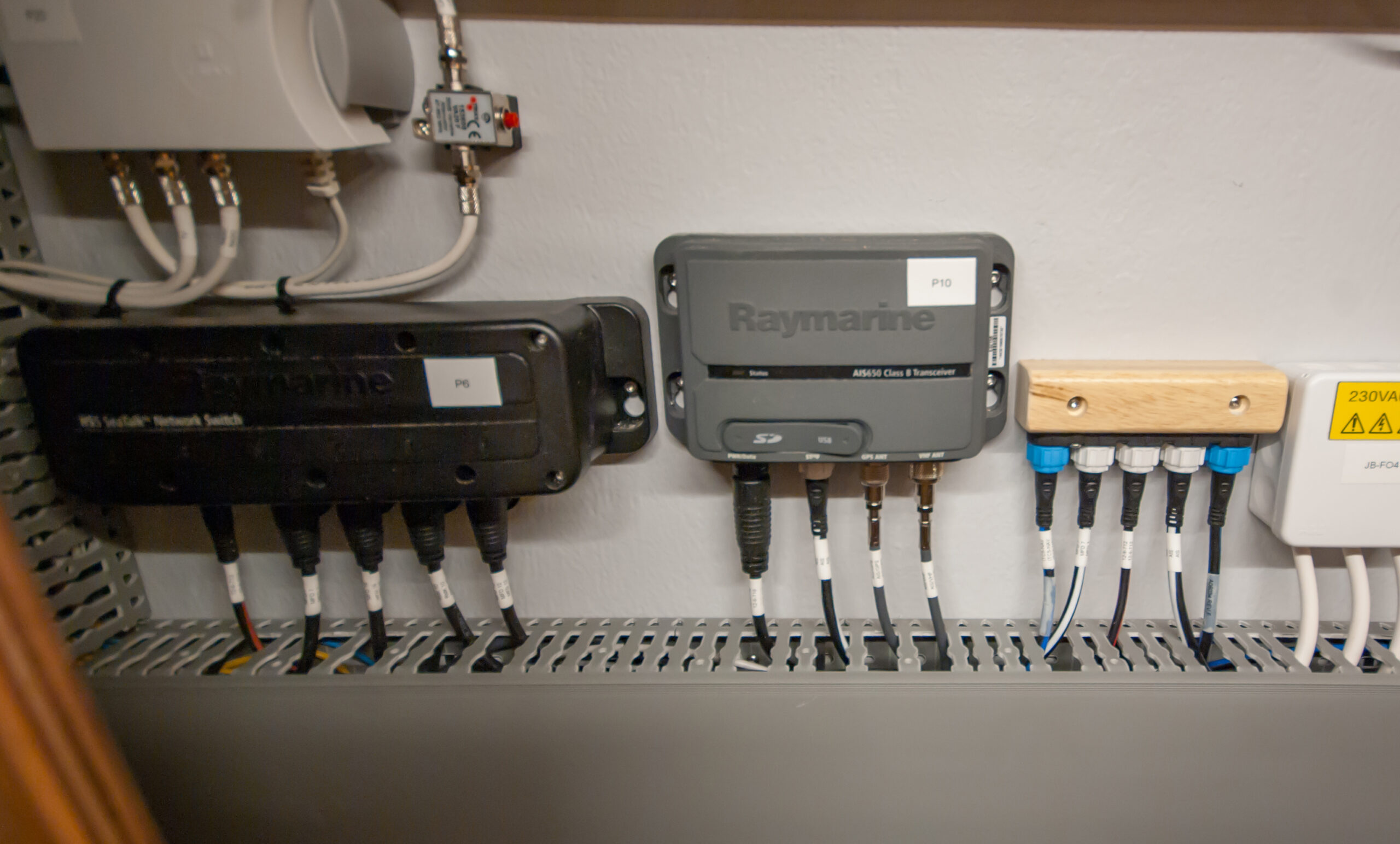
Davon abgesehen können die Blackbox-Gebereinheiten verdeckt montiert werden – sofern keine eingebauten Antennen dagegensprechen (dazu später noch mehr) –, und kommen vielfach auch mit einer reduzierten Verkabelung aus. Dies gilt insbesondere, wenn Netzwerkstandards zum Einsatz kommen, die eine Bündelung von Strom- und Datenleitungen ermöglichen. Und nicht zuletzt muss man sich auch nur noch mit der Benutzerführung einer zentralen Bedieneinheit vertraut machen und nicht mehr mit der Handhabung jedes einzelnen Geräts.

Zauberwort NMEA
Das bekannteste Kürzel im Zusammenhang mit maritimen Netzwerkstandards lautet NMEA. Es steht für „National Marine Electronics Association“ – eine Vereinigung US-amerikanischer Anbieter von Schifffahrtselektronik (www.nmea.org). Sie brachte den gleichnamige Netzwerk-Übertragungsstandard für Marineelektronikkomponenten hervor, der bereits seit Jahrzehnten auf Seeschiffen Anwendung findet. Heute unterstützen nahezu alle Hersteller von Marineelektronik weltweit NMEA-Anbindungen.
Wobei zwischenzeitlich eine ganze Reihe an unterschiedlichen NMMEA-Standards entwickelt und eingeführt wurde. Die älteste Variante stammt aus dem Jahr 1980 und trägt dementsprechend die Bezeichnung NMEA 0180. Dieser Standard ist allerdings inzwischen überholt. Nach wie vor anzutreffen ist der wenige Jahre später eingeführte Standard NMEA 0183. Allerdings wurde auch dieser im Laufe der Jahre stetig weiterentwickelt, wobei nicht alle Versionen untereinander uneingeschränkt kompatibel sind. In einer zeitgemäßen Version kann NMEA 0183 bei manchen Aufgabenstellungen nach wie vor gute Dienste leisten.
Das Urgestein: NMEA 0183
Streng genommen handelt es sich bei NMEA 0183 eigentlich weniger um einen Netzwerk-, als vielmehr um einen Schnittstellenstandard – ein wenig, wie man es früher von der seriellen PC-Schnittstelle (RS 232) kannte. Denn in einem MNEA-0183-Netzwerk kann es immer nur einen Sender, einen sogenannten „Talker“, geben. Er stellt seine Daten einem oder mehreren Empfängern zur Verfügung, die als „Listener“ bezeichnet werden.
Das bedeutet: Ein Geber – zum Beispiel ein GNSS-Empfänger, der Positionsdaten ausgibt – kann zwar mehrere Empfänger mit seinen Daten versorgen, wie zum Beispiel einen Kartenplotter und den DSC-Controller der Seefunkanlage. Ein Empfänger ist jedoch nicht ohne Weiteres in der Lage, auf die Daten mehrerer Sender zuzugreifen. Ein Multifunktionsdisplay, wie man es heute kennt, wäre also allein über NMEA-0183-Anbindungen kaum zu realisieren. Dafür müsste das MFD über eine große Zahl an separaten NMEA-0183-Schnittstellen verfügen – für jeden Geber eine eigene Schnittstelle.
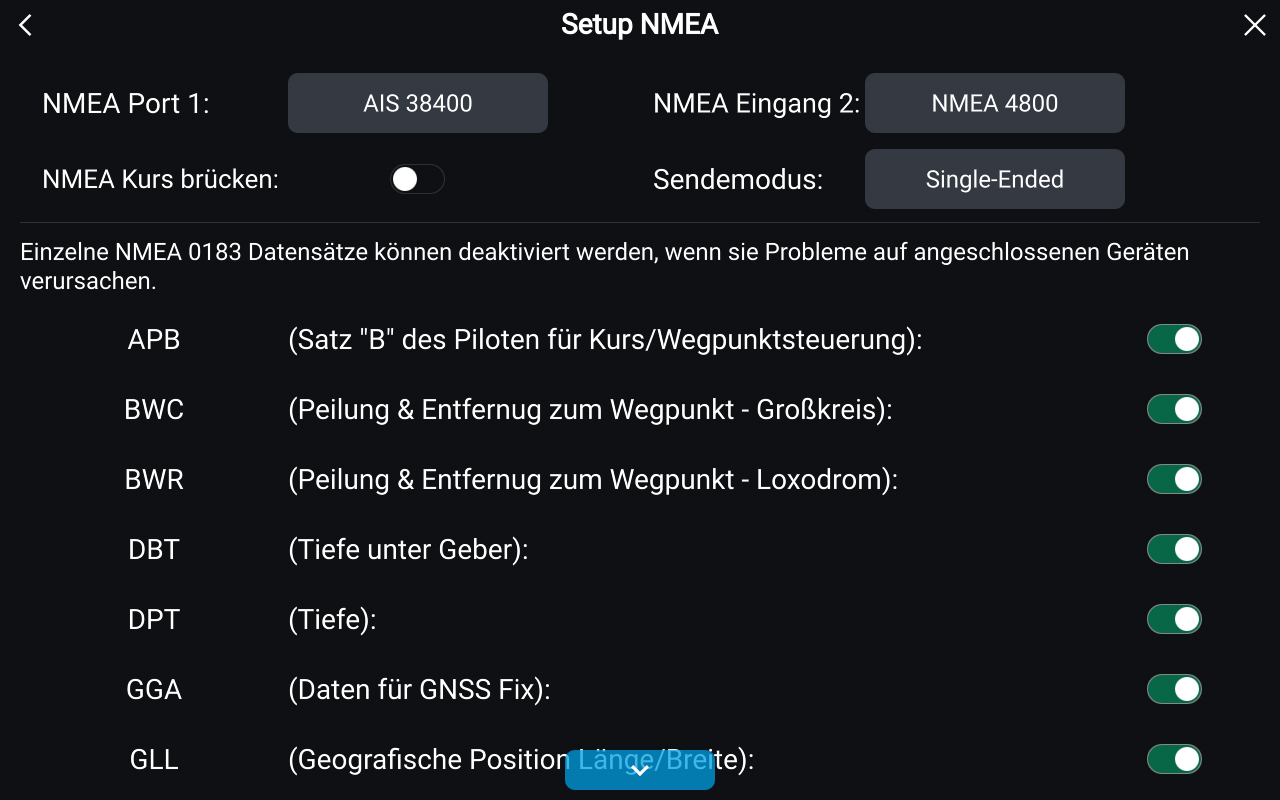
Zwar weisen auch heutige MFDs meist noch mindestens einen NMEA-0183-Port auf. Diese Schnittstelle ist aber eher für die Anbindung älterer und/oder einfacher Geber vorgesehen. Alternativ lassen sich mehrere NMEA-0183-Geber auch über einen sogenannten Multiplexer an einen Empfänger anschließen. Der Multiplexer leitet, vereinfacht erklärt, die Daten der verschiedenen Geber nacheinander an den Empfänger weiter. Manche NMEA-0183-Komponenten erlauben auch ein sogenanntes „Durchschleifen“ von Daten anderer Geber mittels eines eingebauten Multiplexers. Multiplexen führt jedoch naturgemäß zu Verzögerungen in der Datenübertragung.
Ein weiterer Knackpunkt von NMEA-0183-Schnittstellen besteht in der begrenzten Datenrate, die standmäßig lediglich 4.800 Baud (circa 600 Bytes pro Sekunde) beträgt. Im Gegensatz zur seriellen Schnittstelle beim PC wird bei NMEA-0183-Schnittstellen auch nicht mit vorkonfektionierten Steckverbindungen gearbeitet, sondern mit offenen Kabelenden. Die jeweiligen Datenleitungen werden wechselseitig verbunden: das „Out-Kabel“ des Senders mit dem „In-Kabel“ des Empfängers. Bei gegenseitigem Datenaustausch benötigen also beide Seiten „In-“ und „Out-Kabel“.
Um sicherzustellen, dass der Empfänger die Daten des Senders versteht, müssen beide außerdem dieselbe Sprache sprechen. Die Datenübertragung erfolgt bei NMEA in Gestalt von sogenannten „Sentences“, standardisierten Datensätzen im ASCII-Format. Doch nicht jedes Gerät versteht unbedingt auch alle Arten von Datensätzen. Hier ist im Vorfeld ein entsprechender Abgleich ratsam.

Um aber zum Beispiel lediglich den DSC-Controller einer Seefunkanlage mit GNSS-Positionsdaten zu versorgen, würde eine NMEA-0183-Anbindung im Prinzip weiterhin ausreichen. Selbiges gilt für die Datenübertragung von einem AIS-Empfänger an ein MFD. Dafür müsste dann allerdings bei beiden Geräten der Highspeed-Modus der Schnittstelle (NMEA 0183-HS) mit 38.400 Baud eingestellt werden. Und auch wenn nur ein Teil der Navigationselektronik erneuert wird, kommt für die Anbindung älterer Geräte mitunter noch die altbewährte NMEA-0183-Schnittstelle zum Einsatz.
Leistungsstarkes Bus-System: NMEA 2000
Für alles, was über solche einfachen Schnittstellenverbindungen hinausgeht, bedarf es einer leistungsfähigeren Vernetzungstechnologie. Hier kommt NMEA 2000 ins Spiel, das auf dem CAN-Bus basiert („Controller Area Network“), und international oft auch unter dem Kürzel „N2K“ geführt wird. Hier können diverse Geräte gegenseitig ihre Daten untereinander austauschen – bedarf es dafür jeweils nur noch einer Schnittstelle und keines Multiplexers mehr.
Dementsprechend gibt es auch nur noch eine zentrale Datenleitung, in die alle angeschlossenen Geräte eingeklinkt werden. Sie wird als „Backbone“ – englisch für „Rückgrat“ – bezeichnet. Der Name ist durchaus zutreffend, denn der Backbone bildet tatsächlich das Rückgrat des gesamten Netzwerks. Zumal über den Backbone auch die Stromversorgung der einzelnen Komponenten erfolgen kann, sofern ihre Leistungsaufnahme nicht zu hoch ist. Die Bündelung von Daten- und Stromleitung reduziert wiederum den Installationsaufwand.
Der Anfang und das Ende des Backbones werden über dort eingesetzt Widerstände, sogenannte Terminatoren, definiert. Die einzelnen Geräte werden wiederum über T-Stücke in den Backbone eingeklinkt. Vom T-Stück führt eine Stichleitung – auch „Spur-Kabel“ genannt – zum jeweiligen Gerät. Es ist also nicht möglich, die NMEA-2000-Ports zweier Geräte direkt miteinander zu verbinden – die Vernetzung erfolgt stets über die Zentralleitung, in welche die Geräte eingebunden werden. Auch die Spannungsversorgungsleitung wird über ein T-Stück an den Backbone angebunden.
Ein Backbone muss aber nicht zwingend aus einer langen Leitung bestehen, sondern kann sich prinzipiell auch aus aneinandergereihten T-Stücken zusammensetzen. Tipp: Bei solchen Lösungen sollten die T-Stücke auf einer festen Unterlage verschraubt werden. Denn im Betrieb können sich die Steckverbindungen erwärmen und durchbiegen – im ungünstigsten Fall sogar brechen. Alternativ gibt es sogenannte Mehrfachverteiler, die die Funktion mehrerer aneinandergereihter T-Stücke übernehmen. Bei umfangreichen Netzwerken lassen sich auch mehrere solcher Verteiler über zwischengesetzte Backbone-Verlängerungskabel zu einer Zentralleitung zusammenschließen. Wichtig ist lediglich, dass an den Enden stets entsprechende Terminatoren den Backbone begrenzen.
In manchen Gebern, die typischerweise am Backbone-Ende eingesetzt werden – zum Beispiel Windmessern – sind mitunter auch schon Endwiderstände installiert. Und über sogenannte NMEA-0183-N2K-Wandler lassen sich übrigens auch die Daten älterer Geräte, die nur einen NMEA-0183-Port aufweisen, in einen NMEA-2000-Backbone einspeisen.
Bei NMEA 2000 gibt es obendrein vorkonfektionierte Steckverbindungen, die die Installation zusätzlich erleichtern. Hier ist allerdings auf die Ausführung zu achten. Nicht alle Hersteller verwenden für N2K-Vernetzungen die üblichen Micro-C-Stecker und -Buchsen. Während beispielsweise Garmin- und Furuno auf „waschechtes“ NMEA-2000 setzen, gibt es bei Raymarine und Navico mit SeakTeak-NG und Simnet proprietäre Varianten. Hier muss man gegebenenfalls auf Adapterlösungen zurückgreifen, wenn Drittanbieterkomponenten mit eingebunden werden sollen.

Die vorkonfektionierten Backbone-Kabel, Stichleitungen, T-Stücke und Verteiler haben zudem ihren Preis. Bei aufwendigen Netzwerklösungen können allein für diese vermeintlichen Kleinteile schnell ein paar hundert Euro zusammenkommen. Tipp: Einige Hersteller legen ihren Geräten bereits Stichleitungen, T-Stücke und Backbone-Komponenten bei – das sollte bei Preisvergleichen mitberücksichtigt werden.
LEN- und PGN-Nummer
Soll auch die Spannungsversorgung von angeschlossenen Geräten über den Backbone erfolgen, ist der Spannungsabfall über die Netzleitung zu beachten. Dieser darf bis zum entferntesten Gerät nicht mehr als 3 Volt betragen. Bei der Einschätzung hilft der sogenannte „LEN-Wert“ (LEN = Load Equivalency Number) des jeweiligen Geräts (ist meist hinten auf dem Gerät angegeben oder auch unter den technischen Daten in der Bedienungsanleitung zu finden). Die Summe der LEN-Nummern der zwischen der Batterie und dem äußeren Ende des Netzwerks angeschlossenen Geräte ergibt die sogenannte Netzbelastung. Der Spannungsabfall im Netzwerk lässt sich mittels folgender Formel bestimmen:
Kabelwiderstand (Ohm/Meter) x Batterieabstand bis zum letzten Gerät (Meter) x Netzbelastung x 0,1
Ein weiteres Kürzel, das einem im Zusammenhang mit NMEA-2000-Netzwerken begegnet, ist „PGN“. Hier geht es darum, sicherzustellen, dass sich die angebundenen Geräte untereinander verstehen. Das lässt sich anhand der sogenannten „Parameter Group Number“, kurz PGN, überprüfen. Eine übereinstimmende PGN weist auf kompatible Datensätze hin (findet sich meist ebenfalls in der jeweiligen Bedienungsanleitung).
Noch schneller: Ethernet-Varianten
Mit einer Datenrate bis zu 250.000 Baud ist ein N2K-Netzwerk zwar deutlich schneller als eine NMEA-0183-Schnittstelle – für einige Anwendungen reicht aber auch das nicht aus. Dies gilt vor allem für das Radar und grafische Echolote (Sonar). Blackbox-Radarscanner und Sonar-Geber werden daher meist via Ethernet an ein MFD angebunden, das bis zu 100 Megabit pro Sekunde durchlässt (leistungsstarke Versionen sogar bis zu 1 GB/sek).
Zwar trifft man hier oft die von PC-Netzwerken bekannten RJ-45-Stecker an (wenn auch in abgedichteter Ausführung), eine herstellerübergreifende Kompatibilität besteht jedoch im Allgemeinen nicht. Abweichende Datensätze sorgen dafür, dass man bei solchen Gebern in aller Regel „in der Familie“ bleiben muss. Geber und MFD sollten also vom selben Hersteller stammen. Und selbst dann lohnt ein vorheriger Kompatibilitätsabglich, denn mitunter werden auch nicht alle Radarscanner und Sonargeber eines Herstellers von allen MFDs derselben Marke unterstützt und umgekehrt.
Ethernet-Anbindungen tragen auch häufig herstellerspezifische Bezeichnungen – zum Beispiel „NavNet“ bei Furuno, „Garmin Marinenetzwerk“ oder „Garmin BlueNet“ sowie „SeaTalk-HS“ oder „RayNet“ bei Raymarine. Die Anbindung erfolgt grundsätzlich direkt zwischen Geber und MFD – also ohne Verteilerleitung. Weist das MFD keine hinreichende Anzahlzahl an Ethernet-Ports für die vorhandenen Geber auf oder sollen mehrere MFDs an Bord installiert werden – zum Beispiel eines im Cockpit und eines unter Deck– bedarf es eines kompatiblen Netzwerk-Switches, den alle Markenanbieter ebenfalls im Programm haben.
Ethernet-Komponenten benötigen zudem immer eine separate Stromversorgung. Wobei, wie bereits angedeutet, auch bei N2K nicht jedes Gerät über den Backbone mit Spannung versorgt werden kann. Gerade Geräte mit hoher Leistungsaufnahme wie MFDs, AIS-Transceiver und Seefunkanlagen – hier auch unter Sicherheitsaspekten – erfordern in aller Regel eine eigene Spannungsversorgung.
WLAN und Bluetooth
WLAN als kabellose Ethernet-Variante wird von vielen MFDs ebenfalls unterstützt – allerdings nur in seltenen Fällen als Alternative zu den zuvor beschriebenen Anwendungsfällen. So sieht zum Bespiel bislang lediglich Raymarine bei einigen Produkten eine drahtlose Datenverbindung zwischen einem Radarscanner und einem MFD vor. WLAN-Verbindungen sind meist primär für die Anbindung von Mobilgeräten gedacht.
So bieten viele bekannte Markenhersteller für ihre Navigationssysteme kompatible Apps für Smartphones und Tablets an, über die sich Letztere sozusagen als Zweigstelle zum MFD nutzen lassen. Dann kann die MFD-Ansicht zum Beispiel auf dem Tablet gespiegelt werden und Letzteres ebenso als eine Art Fernbedienung für das Navigationssystem verwendet werden.
Demselben Zweck dienen WLAN-Antennen an manchen Blackbox-Gebern, wie zum Beispiel AIS-Transceivern. Wer solche Geber verdeckt montieren möchte, sollte auf eine Anschlussmöglichkeit für eine externe WLAN-Antenne achten. Integrierte Antennen könnten ansonsten zu stark abgeschattet werden. Selbiges gilt für integrierte GNSS-Antennen.
Videoeingänge für die Anbindung von Kameras und Nachtsichtgeräten sowie Videoausgänge zum Anschluss von Tochterdisplays und Multimedia-Ports zur Wiedergabe entsprechender Inhalte auf dem MFD komplettieren den bunten Reigen verfügbarer Datenschnittstellen an aktuellen Multifunktionsdisplays. Hinzu kommen Bluetooth-Funkverbindungen, zum Beispiel zum Ankoppeln einer kabellosen Fernbedienung oder einer kompatiblen Smartwatch. Wobei diese Aufzählung keineswegs abschließend ist.
Tückische Fallstricke
Abgesehen von solchen speziellen Anwendungsfällen gesellen sich zu den herstellerübergreifenden NMEA-Standards weiterhin ebenso proprietäre Netzwerkstandards, die ganz eigene Wege gehen. In früherer Zeit waren sie noch häufiger anzutreffen und kommen daher gerade bei älteren Geräten immer mal wieder ins Spiel. Beispiele bilden SeaTalk-1, Nexus-Netzwerke oder der Topline-Bus von NKE. Letzterer wird vom französischen Marineelektronikspezialisten nach wie vor verwendet.
Es gibt zwar auch hier jeweils Konverterboxen, um die Daten gegebenenfalls auch in einem N2K-Netzwerk verfügbar zu machen. Allerdings funktioniert dies nicht immer reibungslos und im erwünschten Umfang. Dafür haben rein proprietäre Lösungen den Vorteil, „innerhalb der Familie“ uneingeschränkte Kompatibilität gewährleisten zu können. Doch auch das führt nicht immer zum Wunschergebnis – vielleicht findet sich dort ein Lieblingsgeber, aber nicht unbedingt auch das Lieblings-MFD.
Letztlich muss man somit stets im Einzelfall abwägen, wo die eigenen Prioritäten gesetzt werden sollen und was einem mit Blick auf das Gesamtsystem wichtig ist. Zumal auch nicht alle MFDs einen gleichwertigen Funktionsumfang bereitstellen. Der Funktionsumfang der Geberhardware lässt sich jedoch nur dann ausschöpfen, wenn er auch vom MFD vollumfänglich unterstützt wird. Und das ist eben keine Selbstverständlichkeit.

Ein vernetztes Navigationssystem, das den persönlichen Ansprüchen gerecht wird, erfordert dementsprechend umfangreiche Vorabüberlegungen sowie eine dezidierte Planung, die alle Vorzüge und Grenzen im Detail gegeneinander abwägt. Hier kann es sich lohnen, sich kompetent beraten zu lassen, um nicht am Ende teures Lehrgeld zahlen zu müssen. Unabhängige Fachleute erstellen auf Basis solcher Erwägungen detaillierte Installationspläne, die ein frustrierendes „Try and error“ vermeiden.
Und natürlich verlangen maritime Netzwerkkomponenten auch nach regelmäßigen Updates. Diese gestalten sich wiederum einfacher, wenn möglichst viele Geräte derselben Produktfamilie entstammen, denn dann lassen sie sich mitunter gemeinschaftlich über das MFD aktualisieren. Auch das kann ein Auswahlkriterium sein.
Text: Sven M. Rutter